#include <Radar.h>
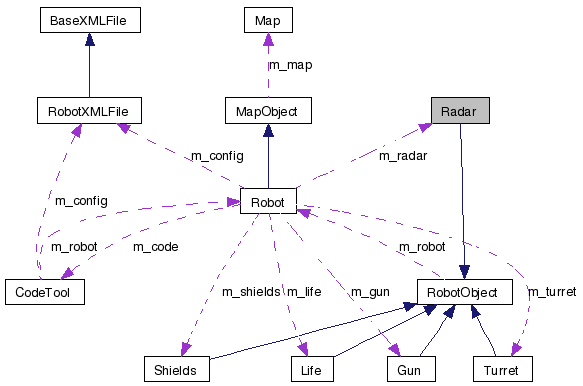
Inheritance diagram for Radar:
Public Member Functions | |
| Radar (Robot &) | |
| ~Radar () | |
| void | Tick (long usec) |
| long | get_property (int) |
| void | set_property (int, long) |
| long | call_method (int, stack_v &) |
| void | Scan (Map &, int distance) |
| void | SetMaxPower (int x) |
| void | SetMaxDistance (int x) |
| void | SetChargeSpeed (int x) |
| int | GetMaxPower () |
| int | GetMaxDistance () |
| int | GetPower () |
| int | GetChargeSpeed () |
| scan_v & | GetScanlist () |
Private Types | |
| typedef std::vector< SCAN * > | scan_v |
Private Attributes | |
| int | m_max_power |
| int | m_max_distance |
| int | m_power |
| int | m_charge_speed |
| scan_v | m_scanlist |
Classes | |
| struct | SCAN |
Definition at line 11 of file Radar.h.
typedef std::vector<SCAN *> Radar::scan_v [private] |
| Radar::Radar | ( | Robot & | ) |
| void Radar::Tick | ( | long | usec | ) | [virtual] |
Reimplemented from RobotObject.
Definition at line 18 of file Radar.cpp.
References RobotObject::Tick().
Referenced by Robot::Tick().
00019 { 00020 RobotObject::Tick(usec); // repair 00021 00022 }
| long Radar::get_property | ( | int | ) | [virtual] |
Implements RobotObject.
Definition at line 30 of file Radar.cpp.
References RobotObject::GetDamage(), RobotObject::GetRepairRate(), and RobotObject::Ok().
00031 { 00032 switch (prop) 00033 { 00034 case 1: // ok 00035 return Ok(); 00036 case 2: // damage 00037 return GetDamage(); 00038 case 3: // repair_rate 00039 return GetRepairRate(); 00040 } 00041 return 0; 00042 }
| void Radar::set_property | ( | int | , | |
| long | ||||
| ) | [virtual] |
Implements RobotObject.
Definition at line 45 of file Radar.cpp.
References RobotObject::SetRepairRate().
00046 { 00047 switch (prop) 00048 { 00049 case 3: 00050 SetRepairRate(value); 00051 break; 00052 } 00053 }
| long Radar::call_method | ( | int | , | |
| stack_v & | ||||
| ) | [virtual] |
| void Radar::SetMaxPower | ( | int | x | ) | [inline] |
| void Radar::SetMaxDistance | ( | int | x | ) | [inline] |
| void Radar::SetChargeSpeed | ( | int | x | ) | [inline] |
| int Radar::GetMaxPower | ( | ) | [inline] |
| int Radar::GetMaxDistance | ( | ) | [inline] |
| int Radar::GetPower | ( | ) | [inline] |
| int Radar::GetChargeSpeed | ( | ) | [inline] |
| scan_v& Radar::GetScanlist | ( | ) | [inline] |
int Radar::m_max_power [private] |
int Radar::m_max_distance [private] |
int Radar::m_power [private] |
int Radar::m_charge_speed [private] |
scan_v Radar::m_scanlist [private] |
 1.3.6
1.3.6